FABRICATION-INFORMED DESIGN OF ROBOTICALLY ASSEMBLED STRUCTURES
Partnering Workshop Leaders: Stefana Parascho, Caitlin Mueller, Yijiang Huang
Where: University of the Arts Berlin - Germany
When: Fall 2019
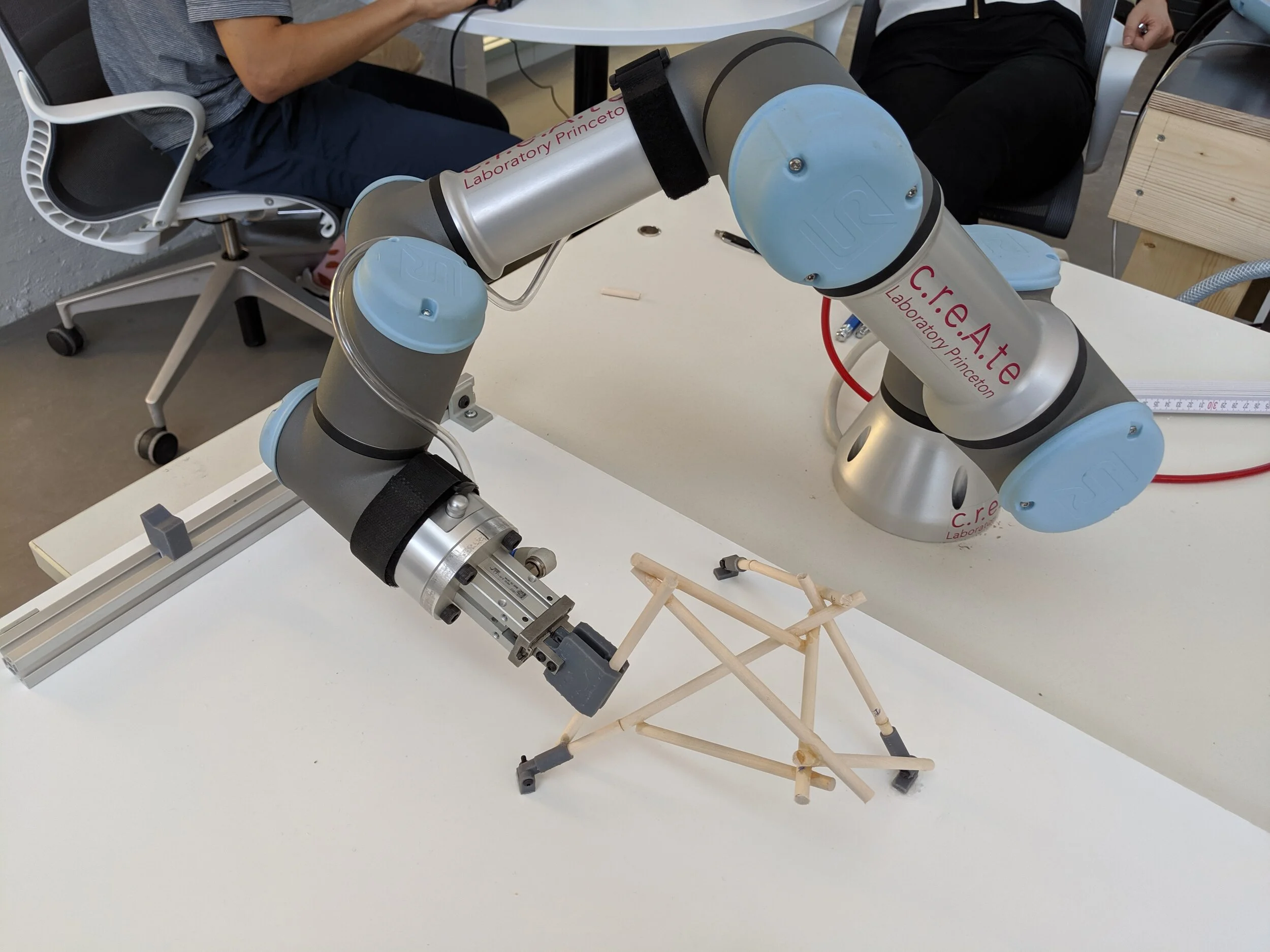
The goal of the workshop was to explore the relationship between design and fabrication and to present new strategies for integrating fabrication information in the design process. The workshop focused on robotic assembly methods and the relationship between the robot’s kinematics, the assembly sequence, and the design method. Participants designed small-scale spatial bar structures that were simulated and visualized through robotic simulation tools and ultimately assembled with robotic arms. The design process utilized a custom sequential design engine, for the generation of robotically assembled spatial bar structures. This design engine was used in combination with the pychoreo motion- and sequence-planning tool, that enables the definition of collision-free robotic movements and the identification of optimal assembly sequences. Participants were introduced to both the proposed design method and the software tools developed by the tutors. The output goal was a number of small-scale spatial structures made of wooden or acrylic bars that exploited the robot’s capability of assembling irregular geometries and showcased the kinematic complexity of the robotic set-up.




For more information, visit design-modeling-symposium.de